rbpf-adaptive
Offline Rao-Blackwellized Particle Filter SLAM Using Adaptive Sampling in ROS2
Abstract
This repository explores an enhanced Rao-Blackwellized Particle Filter (RBPF) SLAM algorithm addressing particle resampling inefficiencies. By incorporating adaptive sampling techniques (dynamic weight normalization and multi-resolution sampling), this SLAM framework is implemented in ROS2 using C++ and tested on the TurtleBot3 platform.
Key contributions include:
- Reducing particle weight variance to minimize depletion.
- Efficient mapping with fewer particles.
- Improved computational overhead and mapping accuracy.
Key Highlights
- Platform: ROS2, C++
- Hardware: TurtleBot3 with LiDAR and wheel odometry
- Environment: Indoor, realistic navigation challenges
Introduction
Simultaneous Localization and Mapping (SLAM) is crucial for enabling autonomous robots to navigate unknown environments.
Challenges Addressed:
- Particle resampling inefficiencies in traditional RBPF SLAM.
- Computational constraints in real-time indoor navigation.
Solution:
We propose adaptive sampling strategies:
- Dynamic Weight Normalization: Balances particle weights.
- Multi-Resolution Sampling: Allocates particles based on uncertainty.
Our methodology ensures accurate localization and mapping with reduced computational requirements.
Core Algorithm
The SLAM problem is defined as:
$p(x_{1:t}, m | z_{1:t}, u_{1:t}) \propto p(x_{1:t} | z_{1:t}, u_{1:t}) \cdot p(m | x_{1:t}, z_{1:t})$
To minimize particle depletion:
- Adaptive Thresholding dynamically adjusts the resampling trigger based on particle weight variance.
- Multi-Resolution Sampling prioritizes high-uncertainty regions for particle allocation.
Implementation
Setup
- Hardware: TurtleBot3 (LiDAR and wheel odometry)
- Software: ROS2, C++, Gazebo Simulation
- Dependencies:
- ROS2 Foxy or higher
- TurtleBot3 packages
- Gazebo (optional for simulation)
Key Components:
- Particle Resampling: Improved weight normalization minimizes outlier effects.
- Map Update: Adaptive particle allocation for efficient grid-based mapping.
- Pose Estimation: EKF-inspired correction enhances robustness.
Experimental Setup
Environment
- Narrow hallways
- Multi-room spaces
- Dynamic obstacles and occlusions
Results
| Metric | Baseline RBPF SLAM | Proposed Method (Adaptive) |
|---|---|---|
| Mapping Accuracy | Lower | Higher |
| Particle Utilization | Inefficient | Optimized |
| Computational Cost | High | Reduced |
Visual Comparison
Baseline RBPF SLAM:
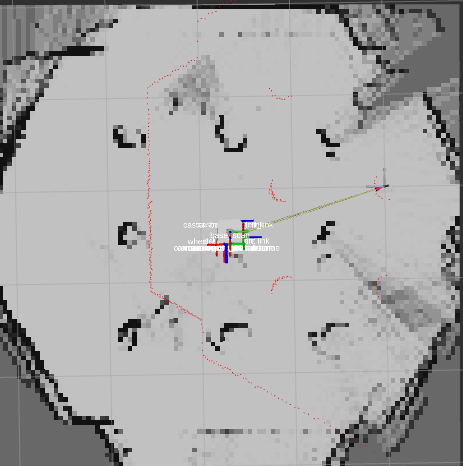
Proposed Method:

How to Run
1. Install Dependencies
Follow ROS2 installation guidelines: ROS2 Docs.
# Install TurtleBot3 and Gazebo dependencies
sudo apt update
sudo apt install ros-foxy-turtlebot3 ros-foxy-gazebo-ros-pkgs
2. Clone the Repository
git clone https://github.com/your-repo/offline-rbpf-slam-adaptive.git
cd offline-rbpf-slam-adaptive
3. Build the Workspace
colcon build
source install/setup.bash
4. Run the Algorithm
For real TurtleBot3:
ros2 launch offline_rbpf_slam adaptive_slam_launch.py
For Gazebo Simulation:
ros2 launch offline_rbpf_slam adaptive_slam_gazebo.launch.py
Results
Our approach achieves:
- Improved Mapping Accuracy with reduced particle count.
- Reduced Computational Overhead via adaptive resampling.
Future Work
- Integration of GTSAM for nonlinear factor graph optimization.
- Testing on larger and more complex environments.
References
- Grisetti, G., Stachniss, C., \& Burgard, W. (2005). Improving Grid-based SLAM with Rao-Blackwellized Particle Filters by Adaptive Proposals and Selective Resampling.
- Montemerlo, M., Thrun, S. (2003). FastSLAM: A Factored Solution to the SLAM Problem.
- OpenSLAM.org: GMapping Package.